
Implementasi Palang Kereta Otomatis
Rahman Aulia Krisnapati
Summary
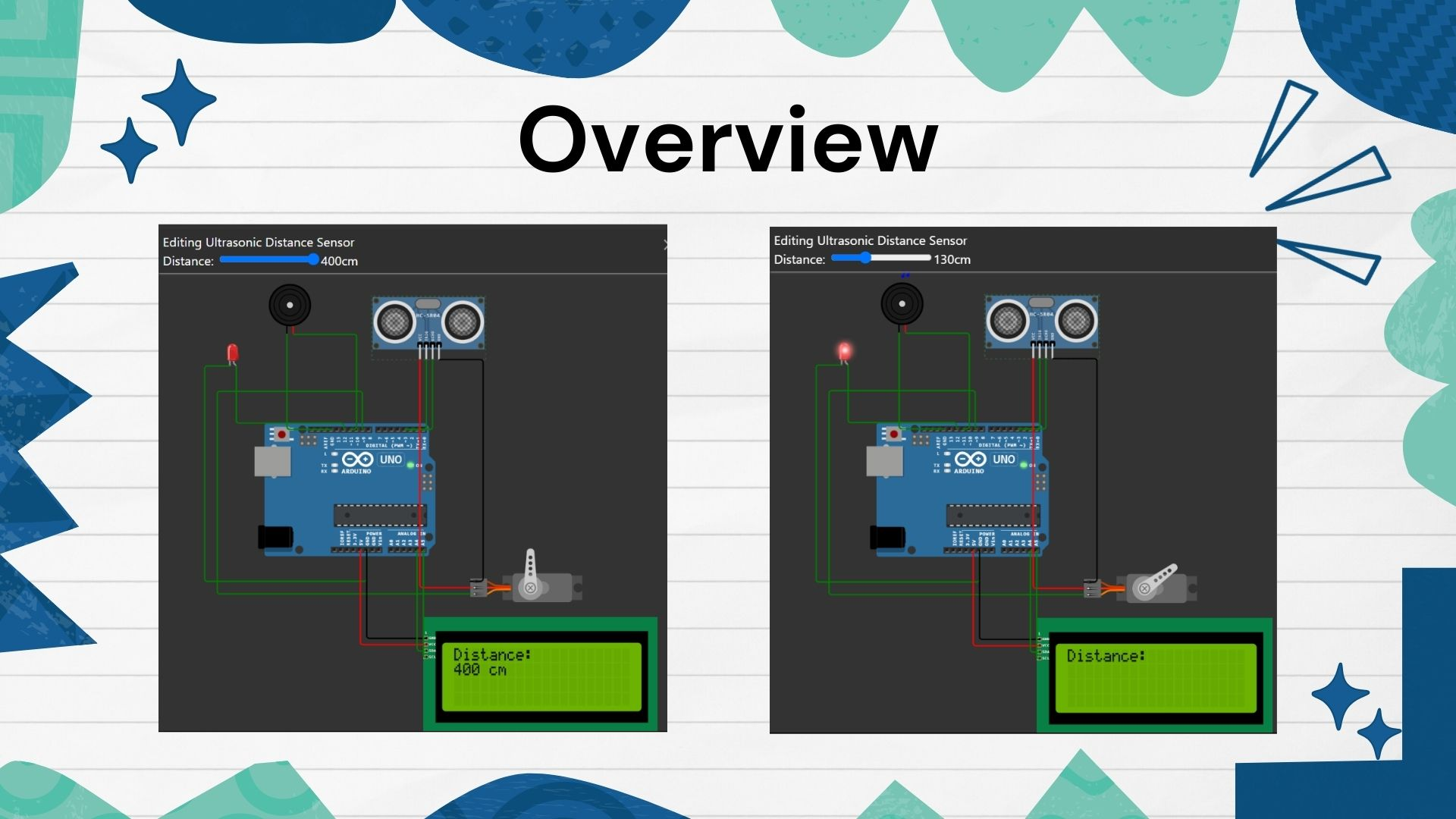
Saya akan menjelaskan model yang saya buat untuk mendeteksi keberadaan kereta api/objek di sekitar sensor yang dapat membuka tutup secara otomatis portal yang sudah saya buat dengan memberikan peringan berupa suara lampu led dan juga lcd
Description
Libraries
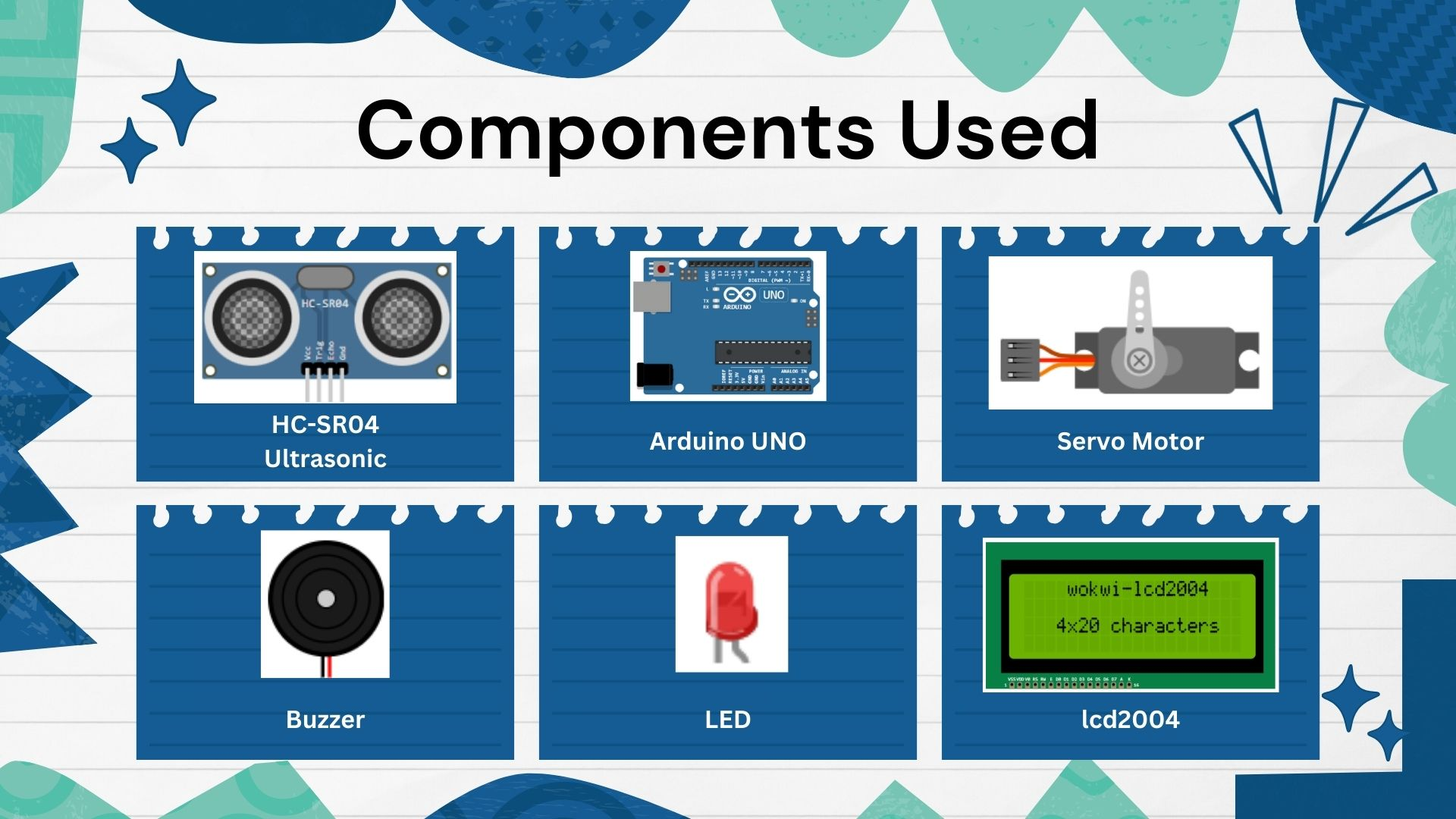
1. Servo.h: Library untuk mengendalikan motor servo.
2. LiquidCrystal_I2C.h: Library untuk mengontrol LCD berbasis I2C.
Pins
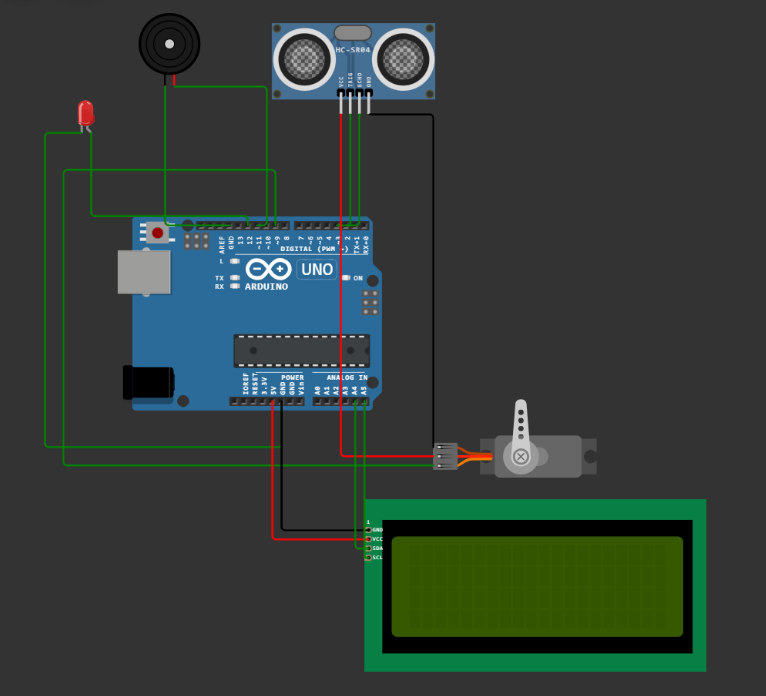
- TrigPin: Pin yang digunakan sebagai output untuk mengirim sinyal ultrasonik.
- echoPin: Pin yang digunakan sebagai input untuk menerima balikan sinyal ultrasonik.
- servoPin: Pin yang terhubung ke motor servo.
- ledPin: Pin yang mengontrol LED.
- buzzerPin: Pin yang mengontrol buzzer.
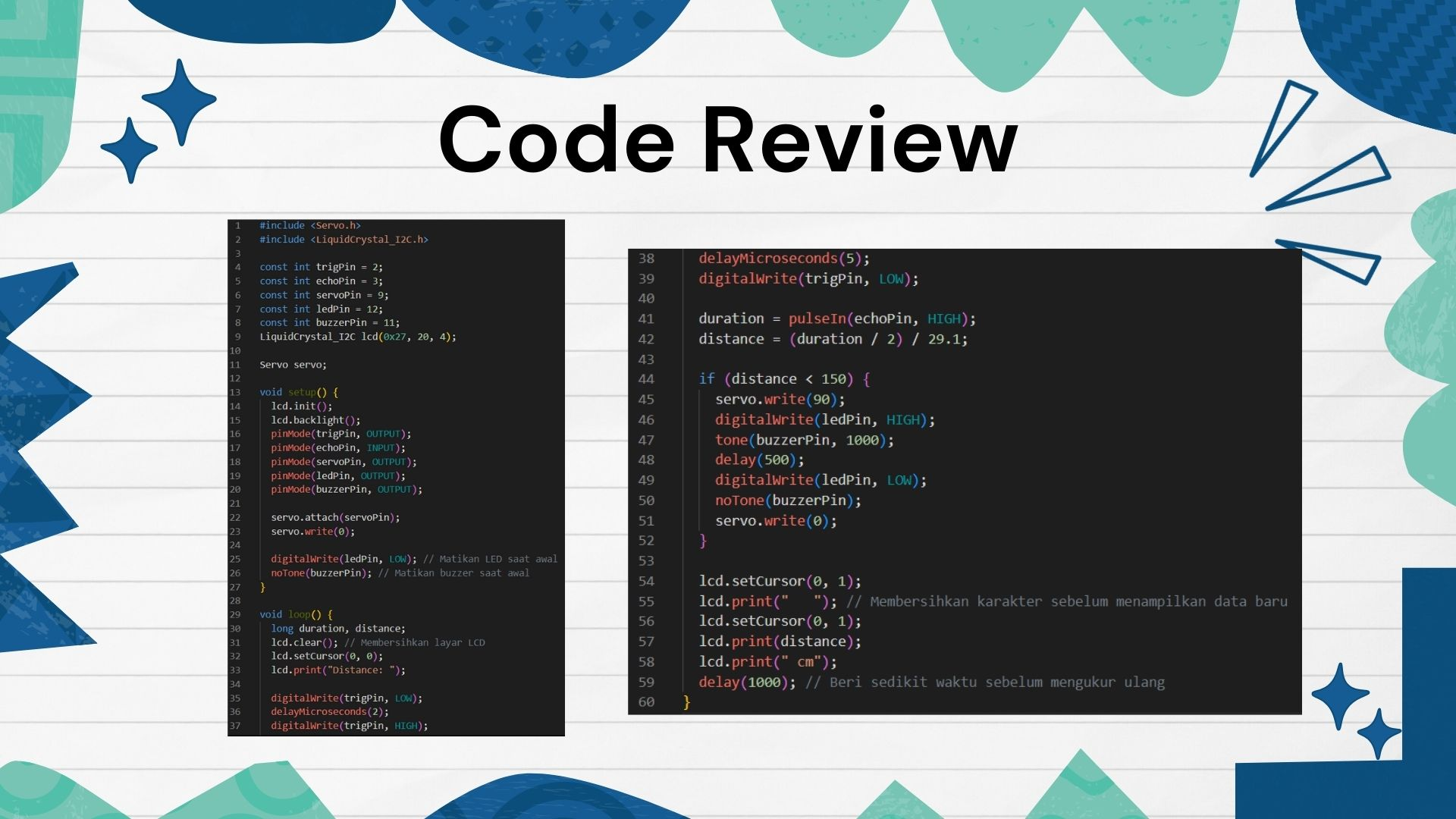
Setup Function (`void setup()`)
- Inisialisasi: Inisialisasi LCD, backlight LCD, dan penentuan mode pin-pin yang digunakan.
- Servo: Melampirkan motor servo ke pin yang ditentukan dan mengatur posisi awal servo ke 0.
- Matikan LED dan Buzzer: Mengatur pin LED dan buzzer menjadi kondisi mati.
Loop Function (`void loop()`)
- Mengukur Jarak: Mengukur jarak menggunakan sensor ultrasonik. Sinyal trigPin dipicu untuk mengirimkan sinyal ultrasonik, dan echoPin digunakan untuk mengukur durasi balikan sinyal.
- Penampilan pada LCD: Membersihkan layar LCD dan menampilkan teks "Distance:" pada baris pertama. Kemudian menampilkan nilai jarak yang diukur pada baris kedua LCD dengan format "xx cm".
- Aksi jika Jarak Kurang dari 150: Jika jarak yang diukur kurang dari 150 cm, motor servo akan bergerak ke posisi 90 derajat, LED akan menyala, buzzer akan berbunyi selama 500ms, dan setelah itu LED dimatikan dan buzzer dimatikan. Setelah itu, servo kembali ke posisi awal (0 derajat).
Penjelasan Tambahan
- PulseIn(): Fungsi untuk menghitung durasi dari sinyal balikan yang diterima dari sensor ultrasonik.
- Servo.write(): Menggerakkan motor servo ke posisi tertentu (dalam derajat).
- Tone() dan NoTone(): Menghasilkan bunyi pada buzzer dengan frekuensi tertentu.
Kode ini secara terus-menerus melakukan pengukuran jarak menggunakan sensor ultrasonik, menampilkan nilai jarak pada LCD, dan melakukan tindakan tertentu jika jarak yang terukur sesuai dengan kondisi yang ditentukan.
Informasi Course Terkait
Kategori: Internet of Things / FPGACourse: Embedded System Berbasis Arduino
