
RANGKAIAN BASIC ELECTRONIC
Afivah Yunita

Summary
Menjelaskan dengan singkat tentang materi IOT dan Elektronika serta menunjukkan beberapa rangkaian sederhana Elektronika beserta codingannya
Description
RINKASASAN MATERI COURSE ROBOTIK : IOT
Internet of Things (IoT) merupakan konsep yang memperluas manfaat konektivitas internet dengan menghubungkan benda elektronik dan peralatan melalui sensor yang selalu aktif. Tujuan utamanya adalah memberikan akses informasi yang mudah dan menyeluruh melalui berbagai perangkat dan oleh siapa pun.
IoT telah berkembang pesat dengan semakin banyaknya jumlah alat yang terhubung ke internet setiap tahunnya. Penerapan IoT dapat ditemukan dalam berbagai bidang, termasuk kesehatan, pertanian, lingkungan, transportasi, dan infrastruktur.
Penerapan IoT dalam bidang kesehatan memungkinkan pengawasan pasien dengan menggunakan sensor-sensor untuk memonitor kondisi kesehatan seperti tekanan darah, detak jantung, dan suhu tubuh. Pada bidang pertanian, IoT digunakan untuk pengawasan lahan pertanian dan mengontrol penyiraman serta pengusir hama secara otomatis. Bidang lingkungan menggunakan IoT untuk mendeteksi bencana alam dan mengukur polutan udara. Dalam transportasi, IoT memungkinkan perkembangan kendaraan otonom dan pengawasan lalu lintas yang cerdas. Sedangkan dalam infrastruktur, IoT memungkinkan adanya smart home dan smart city.
Elektronika merupakan ilmu yang mempelajari alat listrik arus lemah yang dioperasikan dengan mengontrol aliran elektron. Sejarah elektronika dimulai dari penemuan efek Edison oleh Thomas Alva Edison dan terus berkembang dengan penemuan diode, triode, transistor, IC, dan komponen elektronika lainnya.
Penerapan elektronika dapat ditemukan dalam berbagai bidang, termasuk bidang medis dengan alat-alat medis digital, bidang industri dengan mesin-mesin digital, dan bidang komunikasi dengan pengembangan gadget, radio, dan komputer.
Komponen pasif dalam elektronika, seperti resistor, kapasitor, dan induktor, tidak memerlukan arus listrik untuk beroperasi. Komponen aktif, seperti dioda dan transistor, memerlukan arus eksternal untuk berfungsi.
MEMBUAT RANGKAIAN ELEKTRONIKA SEDERHANA MENGGUNAKAN WEBSITE SIMULASI THINKERCAD
rangakian flip flop
code:
void setup() // dijalankan sekali
{
pinMode(7, OUTPUT); // pin 7(led Hijau) sebagai digital output
pinMode(8, OUTPUT); // pin 8(led Merah) sebagai digital output
}
void loop() // dijalankan berulang terus menerus
{
digitalWrite(7, HIGH); // Led Hijau nyala
digitalWrite(8, LOW); // Led Merah mati
delay(1000); // Tunggu selama 1000 millisecond/1 detik
digitalWrite(7, LOW); // Led Hijau mati
digitalWrite(8, HIGH); // Led Merah nyala
delay(1000); // Tunggu selama 1000 millisecond/1 detik
}
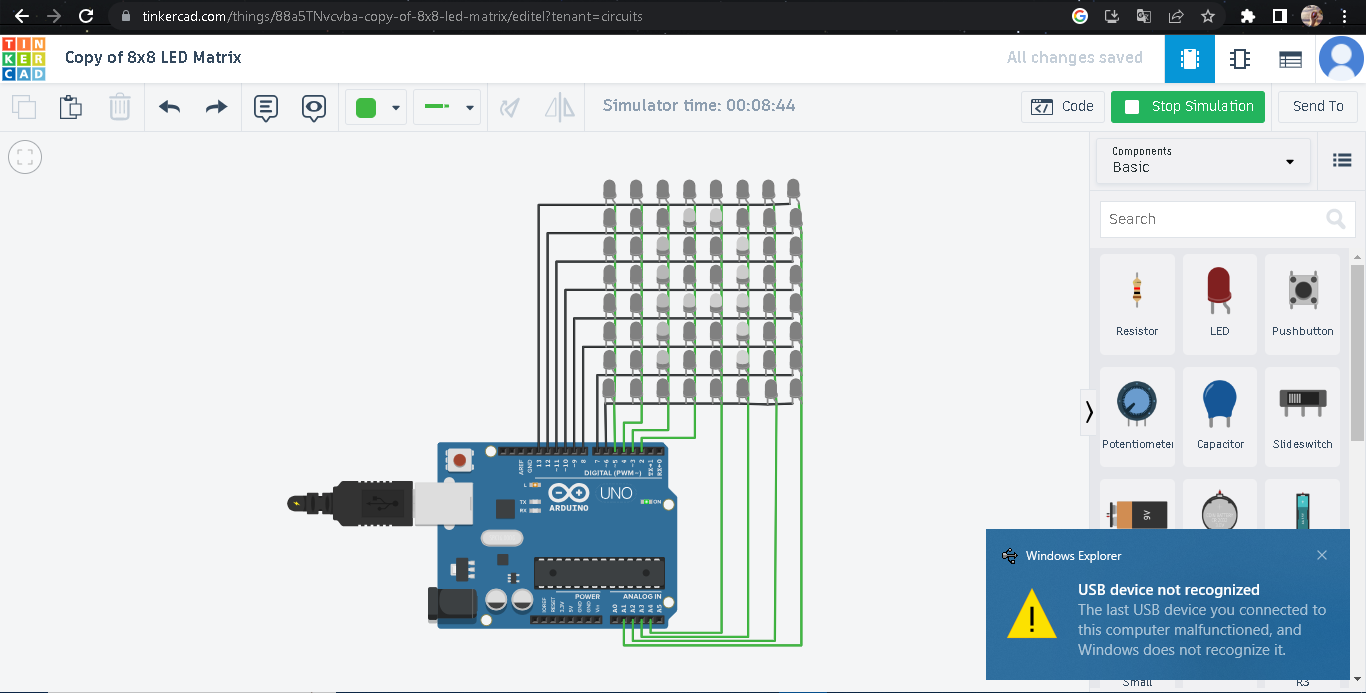
rangkaian led matrix menampilkan huruf A
code:
#define ROW1 13
#define ROW2 12
#define ROW3 11
#define ROW4 10
#define ROW5 9
#define ROW6 8
#define ROW7 7
#define ROW8 6
#define COL1 5
#define COL2 4
#define COL3 3
#define COL4 2
#define COL5 A4
#define COL6 A3
#define COL7 A2
#define COL8 A1
const int row[] = {ROW1, ROW2, ROW3, ROW4, ROW5, ROW6, ROW7, ROW8};
const int col[] = {COL1,COL2, COL3, COL4, COL5, COL6, COL7, COL8};
int A[8][8] = {{1,1,1,1,1,1,1,1},
{1,1,1,0,0,1,1,1},
{1,1,0,1,1,0,1,1},
{1,1,0,1,1,0,1,1},
{1,1,0,0,0,0,1,1},
{1,1,0,1,1,0,1,1},
{1,1,0,1,1,0,1,1},
{1,1,1,1,1,1,1,1}};
void setup() {
Serial.begin(9600);
for (int i = 2; i <= 13; i++) {
pinMode(i, OUTPUT);
digitalWrite(i, LOW);
}
pinMode(A1, OUTPUT);
digitalWrite(A1, LOW);
pinMode(A2, OUTPUT);
digitalWrite(A2, LOW);
pinMode(A3, OUTPUT);
digitalWrite(A3, LOW);
pinMode(A4, OUTPUT);
digitalWrite(A4, LOW);
}
void loop() {
delay(10);
yaz(A);
}
void yaz(int matrix[8][8]){
for (int c=0; c<8; c++){
digitalWrite(col[c], HIGH);
for (int r = 0; r < 8; r++){
digitalWrite(row[r], 255*matrix[r][c]);
delay(1);
}
for (int r = 0; r < 8; r++){
digitalWrite(row[r], HIGH);
delay(1);
}
digitalWrite(col[c], LOW);
}
}
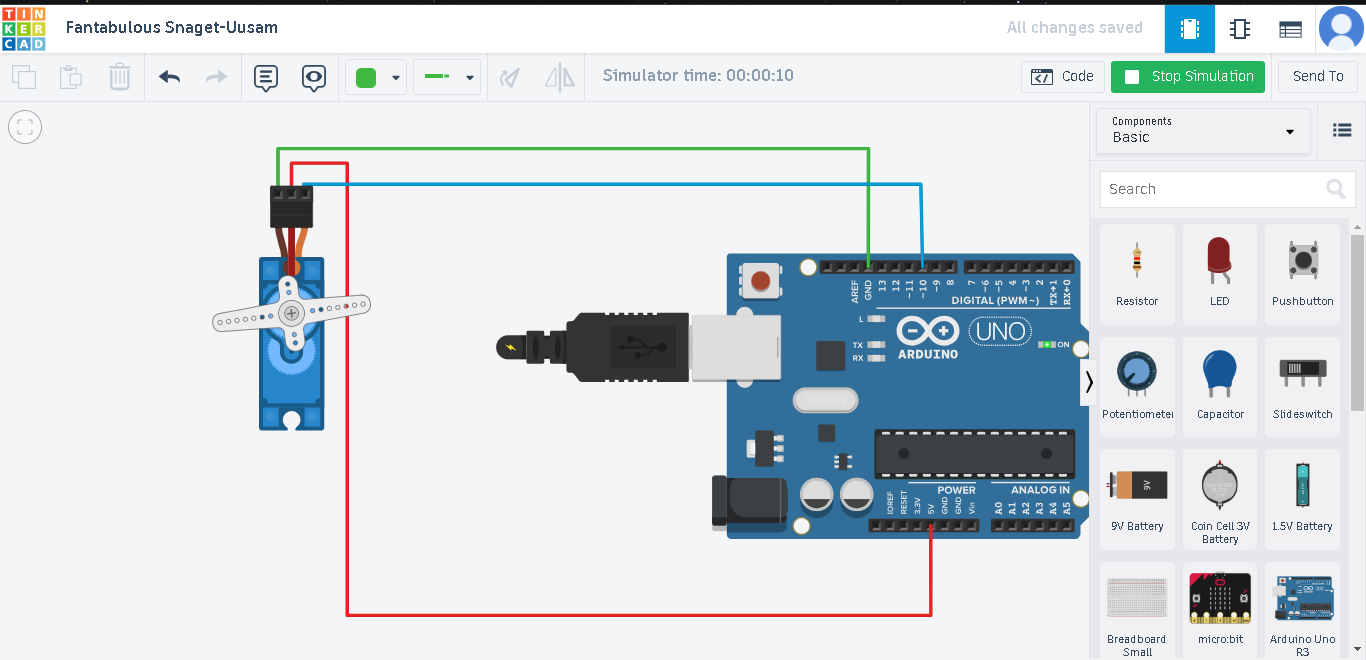
rangkaian sederhana arduino dan servo
code:
#include <Servo.h>
Servo motorServo;
void setup()
{
motorServo.attach(10); // servo Pada Pin digital 10
}
void loop()
{
motorServo.write(45); // Turn Servo ke kiri 45 degrees
delay(500);
motorServo.write(0); // Turn Servo ke kiri to 0 degrees
delay(500);
motorServo.write(90); // Turn Servo ke posisi center position (90 degrees)
delay(500);
motorServo.write(135); // Turn Servo Ke kanan 135 degrees
delay(500);
motorServo.write(180); // Turn Servo ke kanan 180 degrees
delay(500);
motorServo.write(90); // Turn Servo ke posisi center position (90 degrees)
delay(500);
}
Informasi Course Terkait
Kategori: Internet of Things / FPGACourse: Robotic: Internet of Things



